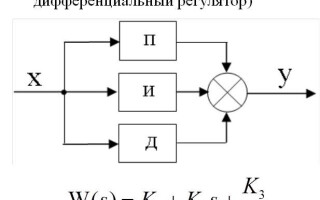
Un regulator diferențial proporțional-integral este un dispozitiv care este instalat în sistemele automate pentru a menține un anumit parametru care poate fi modificat.
Este confuz la prima vedere, dar este posibil să se explice controlul PID și pentru cei mai slabi, și anume persoanelor care nu sunt foarte familiarizate cu sistemele și aparatele electronice.
Cuprins
Ce este un controler PID?
Un controler PID este un dispozitiv integrat în circuitul de control cu reacție obligatorie. Acesta este conceput pentru a menține nivelurile de referință, de exemplu temperatura aerului.
Dispozitivul furnizează un semnal de control sau un semnal de ieșire către controler, pe baza datelor primite de la senzori sau transmițători. Regulatoarele au o precizie tranzitorie și o calitate ridicată a performanțelor.

Trei coeficienți ai regulatorului PID și principiul de funcționare
Funcția regulatorului PID este de a furniza un semnal de ieșire al puterii necesare pentru a menține parametrul controlat la un nivel predeterminat. Pentru a calcula valoarea, se utilizează o formulă matematică complexă, care include 3 coeficienți - proporțional, integral, diferențial.
Să luăm ca obiect de control un rezervor cu apă, în care este necesar să se mențină temperatura la un anumit nivel prin reglarea gradului de deschidere a unei supape de abur.
Componenta proporțională apare în momentul nepotrivirii cu datele de intrare. În termeni simpli, sună în felul următor: se ia diferența dintre temperatura reală și temperatura dorită, se înmulțește cu un coeficient reglabil și se obține semnalul de ieșire care trebuie aplicat supapei. Cu alte cuvinte, de îndată ce temperatura a scăzut, se pornește procesul de încălzire; de îndată ce temperatura a crescut peste cea dorită, se oprește sau chiar se răcește.
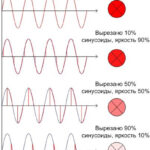
Urmează componenta integrală, care este concepută pentru a compensa efectele mediului înconjurător sau alte influențe perturbatoare asupra menținerii temperaturii noastre la valoarea de referință. Deoarece există întotdeauna factori suplimentari care afectează aparatele controlate, cifra se modifică deja atunci când sosesc datele pentru calcularea componentei proporționale. Și cu cât sunt mai mari influențele externe, cu atât mai mari sunt fluctuațiile din cifră. Apar salturi în livrarea de putere.
Componenta integrală încearcă să returneze valoarea temperaturii pe baza valorilor anterioare, în cazul în care aceasta s-a modificat. Procesul este descris mai detaliat în videoclipul de mai jos.
Apoi, semnalul de ieșire al regulatorului este alimentat în funcție de coeficient pentru a crește sau a scădea temperatura. În timp, este selectată o valoare care compensează factorii externi, iar supratensiunile dispar.
Integrala este utilizată pentru a elimina erorile prin calcularea erorii statice. Principalul lucru în acest proces este selectarea coeficientului corect, altfel eroarea (nepotrivire) va afecta și componenta integrală.
Cea de-a treia componentă PID este componenta diferențială. Acesta este conceput pentru a compensa efectele întârzierilor care apar între impactul asupra sistemului și feedback-ul. Controlerul proporțional furnizează energie până când temperatura atinge valoarea corectă, dar există întotdeauna erori atunci când se transmit informații către dispozitiv, în special în cazul valorilor mari. Acest lucru poate duce la supraîncălzire. Diferențialul anticipează abaterile cauzate de întârzieri sau de influențe de mediu și reduce în avans puterea furnizată.
Configurarea unui regulator PID
Controlerul PID este reglat folosind 2 metode:
- Sinteza presupune calcularea parametrilor pe baza modelului de sistem. O astfel de reglare este precisă, dar necesită o cunoaștere aprofundată a teoriei controlului automat. Acest lucru poate fi realizat doar de ingineri și oameni de știință. Deoarece este necesar să se ia caracteristicile de curgere și să se facă o mulțime de calcule.
- Metoda manuală se bazează pe încercări și erori. Acest lucru se realizează prin preluarea datelor de la un sistem deja existent și prin efectuarea unor ajustări la unul sau mai mulți coeficienți ai regulatorului. După pornirea și observarea rezultatului final, parametrii sunt modificați în direcția dorită. Și așa mai departe, până când se atinge nivelul de performanță dorit.
Analiza teoretică și metodele de reglare sunt rareori utilizate în practică, din cauza lipsei de cunoaștere a caracteristicilor obiectului de control și a multitudinii de posibile influențe perturbatoare. Metodele experimentale bazate pe observarea sistemului sunt mai frecvente.
Procesele automatizate moderne sunt implementate sub formă de module specializate, sub controlul unui software care ajustează coeficienții regulatorului.
Scopul regulatorului PID
Controlerul PID este conceput pentru a menține o anumită valoare - temperatura, presiunea, nivelul într-un rezervor, debitul într-o conductă, concentrația unui lucru etc., la un nivel necesar prin modificarea acțiunii de control asupra actuatorilor, cum ar fi supapele de control automat, folosind valori proporționale, integratoare, diferențiatoare pentru setarea sa.
Scopul aplicației este de a obține un semnal de control precis, care este capabil să controleze instalații mari și chiar reactoare de centrale electrice.
Exemplu de circuit de control al temperaturii
Controlorii PID sunt adesea utilizați în controlul temperaturii, să luăm exemplul simplu de încălzire a apei într-un rezervor ca exemplu al acestui proces automat.
Rezervorul este umplut cu un lichid care trebuie încălzit la temperatura dorită și menținut la nivelul dorit. Există un senzor de temperatură în interiorul rezervorului - un termocuplu. termocuplu sau termometru cu rezistență și este conectat direct la regulatorul PID.
Vom furniza abur pentru a încălzi lichidul, așa cum se arată în ilustrația de mai jos, cu ajutorul supapei de control automat. Supapa însăși primește un semnal de la controler. Operatorul introduce în regulatorul PID valoarea nominală a temperaturii care trebuie menținută în rezervor.

În cazul în care coeficienții regulatorului sunt incorecți, temperatura apei va sări, iar supapa va fi complet deschisă și complet închisă. În acest caz, coeficienții PID trebuie calculați și reintroduși. Dacă se procedează corect, după o perioadă scurtă de timp, sistemul se va egaliza și temperatura din rezervor va fi menținută la temperatura setată, cu gradul de deschidere al supapei de control în poziția de mijloc.
Articole conexe: